Introduction
Mobile robotics is a subfield of robotics focusing on locomotion, or robots that are not fixed to a single location. This can include home robots or delivery and transportation robots that move supplies through a work environment. The most common forms of robot locomotion include walking, rolling, and continuous tracks.
Walking is ideal for rough terrain and stairs and causes less erosion compared to rolling robots. Legged robots are most commonly either quadrupeds, hexapods (designed after the structure of insects such as cockroaches), or bipeds, which have two legs and mimic the human form. Hexapods are great for transportation because they can still function if one leg breaks down, while bipedal movement is common for social humanoid robots because it is a form that is more comfortable to humans. Unfortunately, designing robots for bipedal walking is still very challenging and expensive. The main obstacle is maintaining balance with motors that are not yet as strong as human muscles, especially on uneven surfaces or in the presence of obstacles.
Rolling locomotion, however, has greater stability and energy efficiency. Rolling wheels lose very little energy, while a walking robot loses energy each time the foot impacts the ground. Rolling robots are also stable even when powered off, while a biped would need to move to a resting position before powering off. Rolling systems are also easier to implement because there are hardware and software solutions already available.
Sophia the Robot of Hanson Robotics is a social robot designed to form bonds with humans and gradually learn about the world through exploration and social interaction. Sophia has two forms of locomotion available to her: her walking legs and her rolling base. While we have discussed her legs in a previous post, this post will focus on her mobile base, which utilizes rolling locomotion. We have found this new feature has enabled Sophia to achieve greater speeds, navigate her world more smoothly and safely, and participate more fully in human activities.
Conceptualization
Sophia’s rolling mobile base was created by an interdisciplinary team of artists and engineers at Hanson Robotics. Their goal was to create a base design that is both aesthetically pleasing and more functional and reliable than anything they had produced before. The key to accomplishing this goal was having a multidisciplinary team of people with a variety of skills in both art and engineering. As is common practice in Human-Computer Interaction (HCI), game design, and animatronics, the team first created low-fi prototypes to experiment with various ideas. The aesthetic design was an iterative process, with industrial designer Paul Whelan starting out by creating concept sketches and then transitioning into making 3D renders of various concepts.
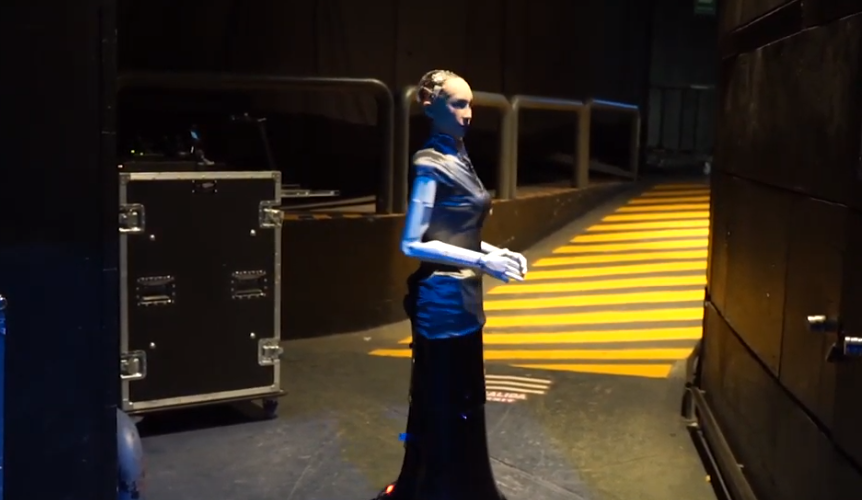
After many design iterations, the team finally settled on a beautiful hexagonal base design that mimics the appearance of a human skirt. The designers then created the final CAD designs of the outer shells for manufacturing, while the base at the very bottom was made by a company called SuperDroid robots.
Challenges
The primary challenge in the design of the base was balancing aesthetics with hardware choices. The base needed to be as small as possible, while still being stable and able to support the weight of the upper body of the robot. The engineers had to think ahead to make sure their hardware choices would not impact the aesthetics of the robot so the designers could have as much room to work with as possible. For example, lead acid batteries, which at first glance were an obvious choice because they are so widely available, were found to be too large. Using them would have required the outer shell to be much wider than desired. Instead, Sophia’s engineers chose smaller and lighter Lipo batteries, which are often used in remote control planes.
Another challenge was assembling the robot with the mobile base. Since Sophia travels to dozens of countries every year, the team had to devise innovative solutions to enable the base to be assembled, reassembled and packed easily.
Other features
Sophia’s base is powered by two lightweight Lipo batteries, allowing her to run for an hour and a half on one charge. Her base has WiFi and two cell modems, so it can be driven using a handheld controller, much like a remote control car. She is able to turn on the spot, and she can reach speeds of up to 1.5 to two meters per second. However, to keep her safe, Sophia’s firmware usually limits her to just 0.3 m/s. She runs best on flat surfaces, but she can go up inclines of approximately eight degrees. She also has a system that moves her arms as she walks, to give the appearance of walking.
Conclusion The collaboration between engineers, artists, and industrial designers for Sophia’s mobile base design led to the perfect balance of aesthetic qualities with stability, maneuverability, and quick assembly. The mobile base greatly benefits Sophia as a social robot because it creates a human-like silhouette that is unobtrusive and does not distract from Sophia’s social interactions with humans. Compared to bipedal walking, her mobile base is simpler, more reliable, and uses less energy. Since it is easily reassembled, it can be transported, so Sophia can stay mobile no matter where she travels in the world.
by the Hanson Robotics Team
Photo and video credits: Hanson Robotics Limited



Recent Comments